グライダー操縦の基本である旋回については以前書いたことがあるのですが、実機でのフライトを習ったことがない方、Condorにフライトシムから入ってきた方のためにもう少し詳しく書いてみました。Condor Club等でフライトトラックを他のパイロットと比較した時にどうしても平均上昇速度の差が気になる方はもう一度旋回操作の基本に戻ってサーマルの中で定常旋回をきれいに出来るように心がけて下さい。
定常旋回の基本は①速度一定②バンク一定③滑らないの三つ。このために①エレベーター②エルロン③ラダーの三舵を調和しながら操作する必要があります。その他、風切り音を聞いて速度の変化を察知することや、実機では僅かなGを感じて姿勢の挙動を感じるのですが、Condorでは残念ながら風切り音は分かるものの、後者のGは残念ながら感じることは出来ません。
【速度(ピッチ)】


【バンク角度】
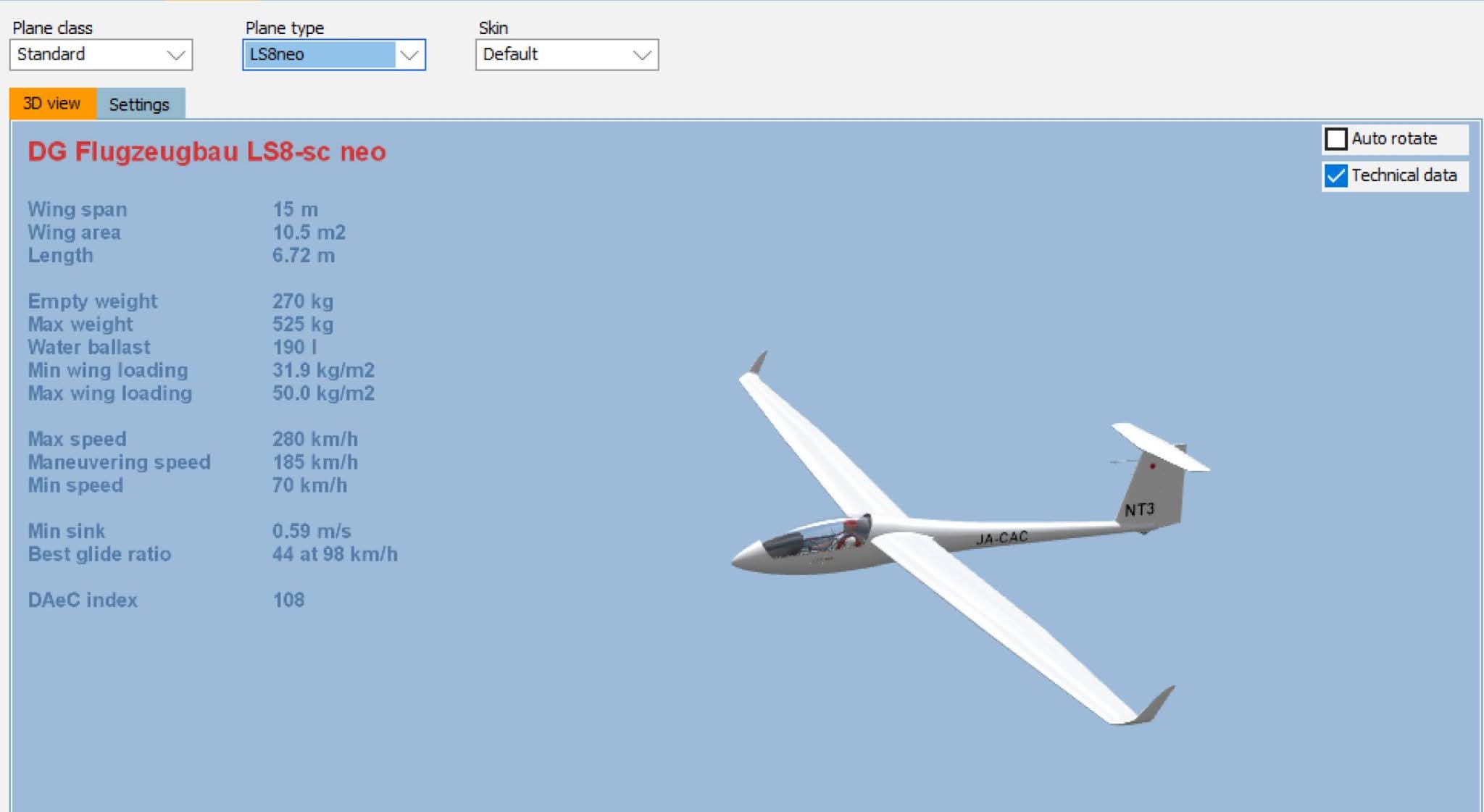
次にバンク角になりますが、先の図の通り地平線と機体の水平との角度を見て一定に保つわけですが、今何度のバンク?というのは分かりにくいものです。グライダーによっては姿勢指示器がついているのでそれを見ると判りやすいので感覚を掴んで下さい。複座機で練習する時は後席の教官に特定の角度の旋回をしてもらったり、自分の旋回が何度くらいあるのか教えてもらえますが、特にそういう経験がないとバンク角度って分かりにくいと思います。その他CoTASAというツールをインストールすれば画面右下の部分に姿勢指示器を表示することが出来るようになります。通常旋回では30度、サーマル旋回では40〜45度と言われています。バンク角が強くなると速度管理がシビアになるのでしっかりと練習しましょう。
【滑り】
最後に、滑りについてはキャノピー正面の毛糸の動きを見ます。エレベーターやエルロンは機体を動かしたい方向にぐっと力をいれば良いので分かりやすいですが、毛糸の動き(滑り)に関しては毛糸が左に振れたら右足を踏み出す、右なら左ととっさに動かすことが出来るように体に覚えさせて下さい。滑りは滑空性能を落としてしまうので、動力機以上にグライダーでは基本的には起こしてはいけないものです。特に旋回中、フルバラストで旋回して速度を抜いている時にはスピンに入りやすく致命傷となります。
実は私がラダー操作をジョイスティックの捻りにしたくない理由はそこにあります。旋回中は微妙にラダーを当てていないといけなくて旋回中常に手首をひねっている必要があります。AキーでAuto Rudderを使うという方法はあるもののそういうCheatはしたくないし、手首の捻りを頻繁に使うことは結構手首に負担がかかるのでやっぱり実機と同じようにラダーペダルが必要だと考えています。旋回に入る時、旋回から出る時、滑りを起こさないように三舵を上手く使って操縦すること、それを三舵の調和といいます。航空部でグライダー操縦を習っている方はぜひラダーペダルを使ってCondorを操縦練習にも役立ててもらいたいと思っています。
その他、サーマル旋回中の注意事項は
a) サーマルのコアのプラスが非常に強い場合、左右の翼に働く上昇風に差ができてコア側の翼を押し上げてバンクを緩めようとする力が働く→つばさを煽られるのを感じたら直ぐにエルロンを捻り込んで姿勢を戻す
b) 旋回中にサーマルのプラスの強いところに入ったら速度が出て、マイナスのところに入ったら速度が抜ける→大気の上下方向の動きが速度にも影響を与えるのですが、それに惑わされないようにピッチを一定に保ちしっかりと定常旋回をしてからサーマルの強い方向をみつける
c) サーマルが小さい場合はバンク角度を少し深くして旋回半径を小さくするとコアを上手く掴めることがある
d) クラブ機やSchoolクラスでは速度90km/hくらいでサーマル旋回するとよいが、高性能機をフルバラストの状態でサーマル旋回する時には120km/hくらいの速度が安定していてよい。でも130km/h以上出すとちょっとスピード出しすぎ。
💭💭💭💭💭💭💭💭💭💭💭
さて、これまで説明したようにサーマル旋回に入った際には地平線とグライダーの位置関係を確認してこの状態で旋回するというところをまずは作ってください。センタリングはその後ですね。コアにはじき飛ばされないようにエルロンをしっかり使ってバンクを一定にすること、スピードの出しすぎで自分で勝手に外側に膨らまないようにするだけでもしっかりサーマルの中で上昇出来るようになります。
米国の航空機の教官の話をどこかで読んだのですが、最近ではフライトシムから実機の操縦の世界に入ってくる人が増えているようで、彼らにはまずは計器を見ないで操縦することを練習させるのだそうです。フライトシムではどうしても画面に集中して計器に頼ってしまっている人が多いとのこと。実機で飛んでいる人は最初からたたき込まれていると思いますが、出来るだけ視野を広くして機体の挙動を五感を使って飛ぶことが航空機の基本です。CondorでもヘッドトラッキングやVRを使ってそういう操縦で楽しんでいただきたいと思っています。 (NT3)